This article explains how to make a visualization network mete which could monitor the state of household appliances in one’s home.
Have you ever imagined seeing how your household appliances working?
Do you know why you paid so much money for the electric charge?
Let’s make a visualization network meter to solve these problems.
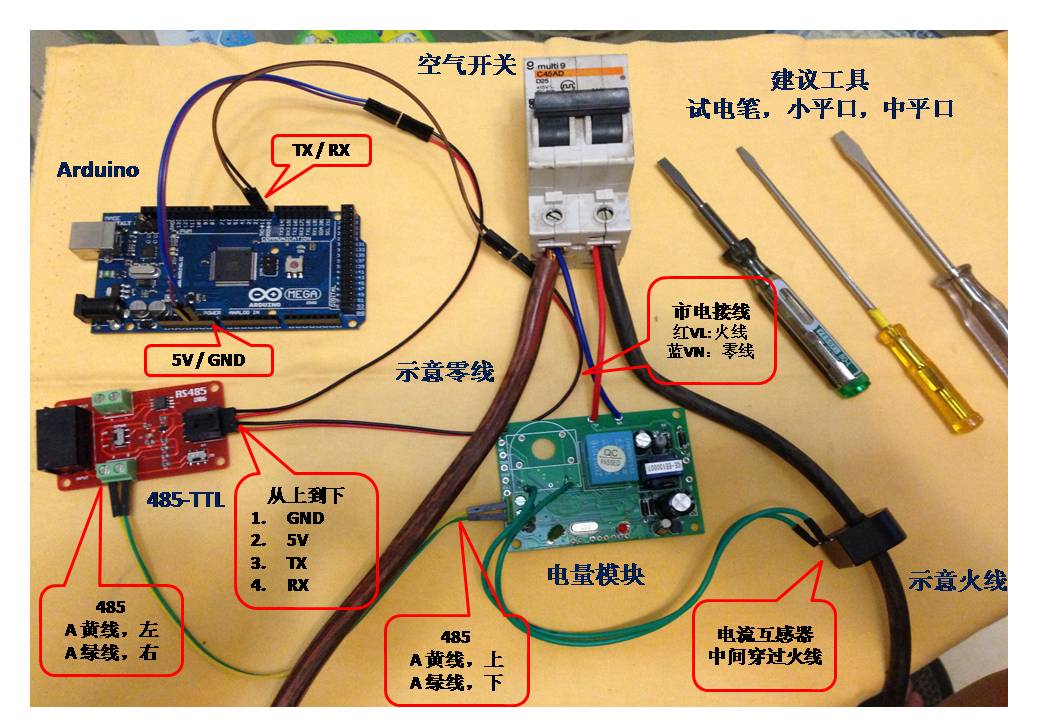
First,you need a piece of communication backplane model which is buildded by Arduino+W5500,a battery test module,an air switch,a test pensil and so on.

Second,switch off your home’s air switch to ensure that no electricity at home.

Third,open the distribution box. Find the main firing line and harness it with the mutual inductor. Then connect the firing line to its original place.

According to the wiring diagram,connect all the other models.
Fourth, turn your home’s air switch on.
Fifth, register on the LeWei Website and set opposite sensors.
Sixth, Code:
// LeWei AC Power Meter trail success2013.06.25
// LeWei AC Power Meter (ZongBiao60A)trail syccess 2013.06.30 18:50pm
// 4 Parameter: watt / kwh / Amp / Voltage / Pf
/* FIXME: not yet being used */
unsigned long interframe_delay = 2; /* Modbus t3.5 = 2 ms */
/*
* preset_multiple_registers: Modbus function 16. Write the data from an
* array into the holding registers of a slave.
* INPUTS
* slave: modbus slave id number
* start_addr: address of the slave's first register (+1)
* reg_count: number of consecutive registers to preset
* data: array of words (ints) with the data to write into the slave
* RETURNS: the number of bytes received as response on success, or
* 0 if no bytes received (i.e. response timeout)
* -1 to -4 (modbus exception code)
* -5 for other errors (port error, etc.).
*/
int preset_multiple_registers(int slave, int start_addr,
int reg_count, int *data);
/*
* read_holding_registers: Modbus function 3. Read the holding registers
* in a slave and put the data into an array
* INPUTS
* slave: modbus slave id number
* start_addr: address of the slave's first register (+1)
* count: number of consecutive registers to read
* dest: array of words (ints) on which the read data is to be stored
* dest_size: size of the array, which should be at least 'count'
* RETURNS: the number of bytes received as response on success, or
* 0 if no valid response received (i.e. response timeout, bad crc)
* -1 to -4 (modbus exception code)
* -5 for other errors (port error, etc.).
*/
int read_holding_registers(int slave, int start_addr, int count,
int *dest, int dest_size);
/*
open.lewei50.com sensor client
*/
#include <SPI.h>
#include <Ethernet.h>
#include <LeweiClient.h>
#define USERKEY "Your API Key" // replace your key here
#define LW_GATEWAY "Your Gateway No."
LeWeiClient *lwc;
unsigned long lastConnectionTime = 0; // last time you connected to the server, in milliseconds
boolean lastConnected = false; // state of the connection last time through the main loop
const unsigned long postingInterval = 30*1000; //delay between updates to cosm.com
int pin = 8;
unsigned long duration;
unsigned long starttime;
unsigned long sampletime_ms = 30000;
unsigned long lowpulseoccupancy = 0;
float ratio = 0;
double concentration = 0;
void setup() {
// start serial port:
Serial.begin(4800);
pinMode(8,INPUT);
delay(10000);
lwc = new LeWeiClient(USERKEY, LW_GATEWAY);
starttime = millis();
}
/* filter program : 20130521 */
#define FILTERLEN 10
unsigned long Array_Average( unsigned long* Array,int length)
{
int x;
unsigned long returnVal;
unsigned long result=0;
for(x=0;x<length;x++)
{
result+=Array[x];
Serial.print("result=");
Serial.println(result);
}
returnVal=result/length;
return returnVal;
}
unsigned long Filter1(unsigned long lowpulse)
{
static unsigned long sfiterArray[FILTERLEN];
static int sindex=0;
int x;
Serial.println("filter1 begin:");
if(FILTERLEN>sindex)
{
sindex++;
Serial.println(sindex);
sfiterArray[sindex]=lowpulse;
Serial.println("filter1 END");
return lowpulse;
}
else
{
for(x=0;x<FILTERLEN-1;x++)
{
sfiterArray[x]=sfiterArray[x+1];
}
sfiterArray[FILTERLEN-1]=lowpulse;
for(x=0;x<FILTERLEN;x++)
{
Serial.println(sfiterArray[x]);
}
Serial.println("Aver:");
Serial.println(Array_Average(sfiterArray,FILTERLEN));
Serial.println("filter1 END");
return(Array_Average(sfiterArray,FILTERLEN));
}
}
/*END: filter program : 20130521 */
int x=0; //simulated sensor output
int sampling=1;
int transfering=0;
/* Modbus para */
int retval;
int data[10];
int tt[30]; //int changed to unsigned int
void loop() {
int i;
/* example, this will write some data in the first 10 registers of slave 1 */
// retval = preset_multiple_registers(1,1,10, data);
// data[0] = retval;
// data[1]++;
// data[8]=0xdead;
// data[9] = 0xbeaf;
// delay(500);
//int read_holding_registers(int slave, int start_addr, int count,int *dest, int dest_size);
// retval = read_holding_registers(2,1, 1,tt,6);
retval = read_holding_registers(1, 0x49, 6, tt, 1); // 1:5,2:7,3:9
// delay(1000);
// Serial.print("receve flag=");
// Serial.println(retval);
int Voltage = tt[0];
Voltage = Voltage / 100;
float Amp = tt[1];
Amp = Amp / 1000;
int Watt = tt[2];
//long y=x0*65536+x1;
unsigned int Kwhh = (unsigned int)tt[3];
//unsigned int Kwhh = (unsigned int)65535; //test maximum
unsigned int Kwhl = (unsigned int)tt[4];
unsigned long kwhA = (unsigned long) Kwhh *65536 + Kwhl;
// unsigned long kwhA = Kwhh <<16 + Kwhl;
float Kwh = kwhA;
Kwh = Kwh / 3200;
// double Kwh = kwhA / 3200; //Kwh = kwh / 32;
// int Kwh = tt[4];
float Pf = tt[5];
Pf = Pf / 1000;
float Cabon = tt[5];
Cabon = Cabon / 1000;
Serial.print(Voltage);
Serial.print(Amp);
Serial.print(Watt);
Serial.print(Kwh);
Serial.print(Pf);
Serial.print(Cabon);
// 4 Parameter: watt / kwh / Amp / Voltage / Pf
lwc->append("kwh", Kwh);
lwc->append("w", Watt);
lwc->append("a", Amp);
lwc->append("v", Voltage);
lwc->append("pf", Pf);
// lwc->append("06", Cabon);
lwc->send();
delay(15000);
}
// this method makes a HTTP connection to the server:
/****************************************************************************
* BEGIN MODBUS RTU MASTER FUNCTIONS
****************************************************************************/
//#define TIMEOUT 1000 /* 1 second */
#define TIMEOUT 10000 /* 10 second */
#define MAX_READ_REGS 125
#define MAX_WRITE_REGS 125
#define MAX_RESPONSE_LENGTH 256
#define PRESET_QUERY_SIZE 256
/* errors */
#define PORT_ERROR -5
/*
CRC
INPUTS:
buf -> Array containing message to be sent to controller.
start -> Start of loop in crc counter, usually 0.
cnt -> Amount of bytes in message being sent to controller/
OUTPUTS:
temp -> Returns crc byte for message.
COMMENTS:
This routine calculates the crc high and low byte of a message.
Note that this crc is only used for Modbus, not Modbus+ etc.
****************************************************************************/
unsigned int crc(unsigned char *buf, int start, int cnt)
{
int i, j;
unsigned temp, temp2, flag;
temp = 0xFFFF;
for (i = start; i < cnt; i++) {
temp = temp ^ buf[i];
for (j = 1; j <= 8; j++) {
flag = temp & 0x0001;
temp = temp >> 1;
if (flag)
temp = temp ^ 0xA001;
}
}
/* Reverse byte order. */
temp2 = temp >> 8;
temp = (temp << 8) | temp2;
temp &= 0xFFFF;
return (temp);
}
/***********************************************************************
*
* The following functions construct the required query into
* a modbus query packet.
*
***********************************************************************/
#define REQUEST_QUERY_SIZE 6 /* the following packets require */
#define CHECKSUM_SIZE 2 /* 6 unsigned chars for the packet plus */
/* 2 for the checksum. */
void build_request_packet(int slave, int function, int start_addr,
int count, unsigned char *packet)
{
packet[0] = slave;
packet[1] = function;
start_addr -= 1;
packet[2] = start_addr >> 8;
packet[3] = start_addr & 0x00ff;
packet[4] = count >> 8;
packet[5] = count & 0x00ff;
//below test only
// packet[0] =0x01;
// packet[1] = 0x03;
// packet[2] = 0;
// packet[3] = 0x48;
// packet[4] = 0;
// packet[5] = 0x02;
}
/*************************************************************************
*
* modbus_query( packet, length)
*
* Function to add a checksum to the end of a packet.
* Please note that the packet array must be at least 2 fields longer than
* string_length.
**************************************************************************/
void modbus_query(unsigned char *packet, size_t string_length)
{
int temp_crc;
temp_crc = crc(packet, 0, string_length);
packet[string_length++] = temp_crc >> 8;
packet[string_length++] = temp_crc & 0x00FF;
packet[string_length] = 0;
}
/***********************************************************************
*
* send_query(query_string, query_length )
*
* Function to send a query out to a modbus slave.
************************************************************************/
int send_query(unsigned char *query, size_t string_length)
{
int i;
modbus_query(query, string_length);
string_length += 2;
for (i = 0; i < string_length; i++) {
// Serial.print(query[i], HEX); //Orginal
Serial.write(query[i]); //JingLi
}
/* without the following delay, the reading of the response might be wrong
* apparently, */
delay(200); /* FIXME: value to use? */
return i; /* it does not mean that the write was succesful, though */
}
/***********************************************************************
*
* receive_response( array_for_data )
*
* Function to monitor for the reply from the modbus slave.
* This function blocks for timeout seconds if there is no reply.
*
* Returns: Total number of characters received.
***********************************************************************/
int receive_response(unsigned char *received_string)
{
int bytes_received = 0;
int i = 0;
/* wait for a response; this will block! */
while(Serial.available() == 0) {
delay(1);
if (i++ > TIMEOUT)
return bytes_received;
}
delay(200);
/* FIXME: does Serial.available wait 1.5T or 3.5T before exiting the loop? */
while(Serial.available()) {
received_string[bytes_received] = Serial.read();
// Serial.print(bytes_received); //only test
// Serial.print("-"); //only test
// Serial.println(received_string[bytes_received]); //only test
bytes_received++;
if (bytes_received >= MAX_RESPONSE_LENGTH)
return PORT_ERROR;
}
//Serial.print("bytes_received=");
//Serial.println(bytes_received);
return (bytes_received);
}
/*********************************************************************
*
* modbus_response( response_data_array, query_array )
*
* Function to the correct response is returned and that the checksum
* is correct.
*
* Returns: string_length if OK
* 0 if failed
* Less than 0 for exception errors
*
* Note: All functions used for sending or receiving data via
* modbus return these return values.
*
**********************************************************************/
int modbus_response(unsigned char *data, unsigned char *query)
{
int response_length;
int i;
unsigned int crc_calc = 0;
unsigned int crc_received = 0;
unsigned char recv_crc_hi;
unsigned char recv_crc_lo;
do { // repeat if unexpected slave replied
response_length = receive_response(data);
}
while ((response_length > 0) && (data[0] != query[0]));
// for (i = 0; i <response_length; i++) { Serial.print(data[i]);Serial.print("---"); Serial.println(query[i]);} //only test
if (response_length) {
crc_calc = crc(data, 0, response_length - 2);
recv_crc_hi = (unsigned) data[response_length - 2];
recv_crc_lo = (unsigned) data[response_length - 1];
crc_received = data[response_length - 2];
crc_received = (unsigned) crc_received << 8;
crc_received =
crc_received | (unsigned) data[response_length - 1];
/*********** check CRC of response ************/
if (crc_calc != crc_received) {
response_length = 0;
// Serial.println("CRC erro"); //only test
}
/********** check for exception response *****/
if (response_length && data[1] != query[1]) {
response_length = 0 - data[2];
}
}
return (response_length);
}
/************************************************************************
*
* read_reg_response
*
* reads the response data from a slave and puts the data into an
* array.
*
************************************************************************/
int read_reg_response(int *dest, int dest_size, unsigned char *query)
{
unsigned char data[MAX_RESPONSE_LENGTH];
int raw_response_length;
int temp, i;
raw_response_length = modbus_response(data, query);
if (raw_response_length > 0)
raw_response_length -= 2;
if (raw_response_length > 0) {
/* FIXME: data[2] * 2 ???!!! data[2] isn't already the byte count (number of registers * 2)?! */
for (i = 0;
i < (data[2] * 2) && i < (raw_response_length / 2);
i++) {
/* shift reg hi_byte to temp */
temp = data[3 + i * 2] << 8;
/* OR with lo_byte */
temp = temp | data[4 + i * 2];
dest[i] = temp;
}
}
return (raw_response_length);
}
/***********************************************************************
*
* preset_response
*
* Gets the raw data from the input stream.
*
***********************************************************************/
int preset_response(unsigned char *query)
{
unsigned char data[MAX_RESPONSE_LENGTH];
int raw_response_length;
raw_response_length = modbus_response(data, query);
return (raw_response_length);
}
/************************************************************************
*
* read_holding_registers
*
* Read the holding registers in a slave and put the data into
* an array.
*
*************************************************************************/
int read_holding_registers(int slave, int start_addr, int count,
int *dest, int dest_size)
{
int function = 0x03; /* Function: Read Holding Registers */
int ret;
unsigned char packet[REQUEST_QUERY_SIZE + CHECKSUM_SIZE];
if (count > MAX_READ_REGS) {
count = MAX_READ_REGS;
}
build_request_packet(slave, function, start_addr, count, packet);
if (send_query(packet, REQUEST_QUERY_SIZE) > -1) {
ret = read_reg_response(dest, dest_size, packet);
}
else {
ret = -1;
}
return (ret);
}
/************************************************************************
*
* preset_multiple_registers
*
* Write the data from an array into the holding registers of a
* slave.
*
*************************************************************************/
int preset_multiple_registers(int slave, int start_addr,
int reg_count, int *data)
{
int function = 0x10; /* Function 16: Write Multiple Registers */
int byte_count, i, packet_size = 6;
int ret;
unsigned char packet[PRESET_QUERY_SIZE];
if (reg_count > MAX_WRITE_REGS) {
reg_count = MAX_WRITE_REGS;
}
build_request_packet(slave, function, start_addr, reg_count, packet);
byte_count = reg_count * 2;
packet[6] = (unsigned char)byte_count;
for (i = 0; i < reg_count; i++) {
packet_size++;
packet[packet_size] = data[i] >> 8;
packet_size++;
packet[packet_size] = data[i] & 0x00FF;
}
packet_size++;
if (send_query(packet, packet_size) > -1) {
ret = preset_response(packet);
}
else {
ret = -1;
}
return (ret);
}
Test page:

For more details, please refer to http://www.geek-workshop.com/forum.php?mod=viewthread&tid=5649 (in Chanese)
COMMENTS