
The Fan Arm controls the eagle freely and can turn On and Off the FAN. It is Controlled by joystick and the Pushbutton with Wi-Fi.The Fan Arm can be controlled wherever we want and where the person is.
Components:
1. WIZwiki-W7500 : as MCU. It is a mbed platform
2. Two WizFi250 shields: as communication
3. Motor shield: for DC motor voltage and It needs 5V supply.
4. Joystick shield: It is totally optional. I regret to buy it.. you will know next why I did..
5. Two AX-12A: for the arm. It is the serial motor.

Client:
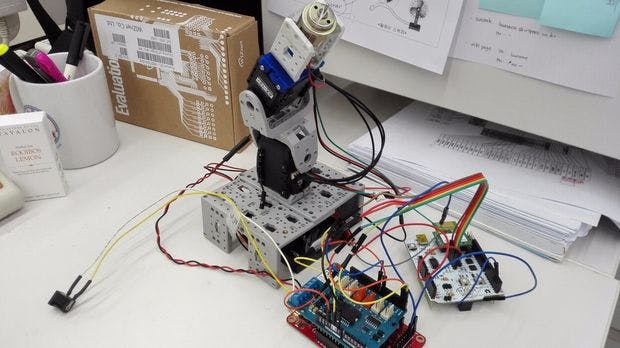
The WiFi(left one in the picture) as UDP Client with joystick & push button.
First, it connects AT.Then Get the analog and digital data from joystick and push button and send it to UDP Server.
Server:
WiFi uses the AT mode and UDP Server with Servo & DC motor.It always opens and waits for the data from Client.Right after receiving data, Servo and DC controlled with UART and PWM.
FAN ARM:

FAN ARM has two serial Servo motor and one DC motor.
Two servo make angle and DC turn on/off fan. (As I did before, I didn’t put a fan)
Controller can control it with WiFi and the communication protocol is UDP.
Hardwired:

“Controller” is UDP Client and it sends analog data from the joystick and digital data from push buttom to UDP Server.
“FAN ARM” , UDP Server, receives the data from “Controller” and control the Servo and DC motor as I want.

The UDP is chosen apart from the TCP.TCP has many rules to send data to the server like synchronization, acknowledgement.
But whereas the UDP Protocol is very simple to use.The client just sends packets.It doesn’t matter to check it is going to the server and can be received.
#include <stdio.h>
#include "mbed.h"
#include "WizFi250Interface.h"
#define SERVER_ADDRESS "192.168.100.1"
#define SERVER_PORT 5000
#define CLIENT_PORT 3000
#define SECURE WizFi250::SEC_AUTO
#define SSID "WizFi250_AP_Test"
#define PASS "1234567890"
#if defined(TARGET_WIZwiki_W7500)
WizFi250Interface wizfi250(D1,D0,D7,D8,PA_12,NC,115200);
Serial pc(USBTX, USBRX);
#endif
AnalogIn xAxis(A0);
AnalogIn yAxis(A1);
DigitalIn Fanon(D4);
DigitalIn Fanoff(D3);
DigitalOut red(LED1);
DigitalOut green(LED2);
void UDPClient();
int main()
{
pc.baud(115200);
printf("WizFi250 Hello World demo. \r\n");
wizfi250.init();
//wizfi250.setAddress("192.168.100.10","255.255.255.0","192.168.100.1");
if ( wizfi250.connect(SECURE, SSID, PASS)) return -1;
printf("IP Address is %s\r\n", wizfi250.getIPAddress());
wait(1.0);
UDPClient();
wizfi250.disconnect();
}
void UDPClient()
{
UDPSocket client;
printf("Socket opened\r\n");
client.set_blocking(false);
client.bind(CLIENT_PORT);
Endpoint server;
server.set_address(SERVER_ADDRESS, SERVER_PORT);
/* ready sign */
green = 0;
wait(0.3);
green = 1;
wait(0.3);
green = 0;
wait(0.3);
green = 1;
wait(0.3);
green = 0;
while(true)
{
int x,y;
char *cmd1 = "left";
char *cmd2 = "right";
char *cmd3 = "up";
char *cmd4 = "down";
char *cmd5 = "init";
char *cmd6 = "fanon";
char *cmd7 = "fanoff";
char send_data[10];
x = xAxis.read() * 1000; // float (0->1) to int (0-1000)
y = yAxis.read() * 1000;
if ( (x < 10) || ((y > 350)&&(y < 420)) )
{
sprintf(send_data, "%s", cmd1);
printf("left\r\n");
}
else if ( (x > 990) || ((y > 520)&&(y < 620)) )
{
sprintf(send_data, "%s", cmd2);
printf("right\r\n");
}
else if ( ((x > 480)&&(x < 570)) || (y > 990) )
{
sprintf(send_data, "%s", cmd3);
printf("up\r\n");
}
else if ( ((x > 350)&&(x < 420)) || (y < 10) )
{
sprintf(send_data, "%s", cmd4);
printf("down\r\n");
}
else if (Fanon == 1)
{
sprintf(send_data, "%s", cmd6);
printf("fan on\r\n");
}
else if (Fanoff == 1)
{
sprintf(send_data, "%s", cmd7);
printf("fan off\r\n");
}
else
{
sprintf(send_data, "%s", cmd5);
printf("init\r\n");
}
client.sendTo(server, send_data, sizeof(send_data));
char in_buffer[256];
int n = client.receiveFrom(server, in_buffer, sizeof(in_buffer));
in_buffer[n] = '\0';
if( n > 0 )
printf("%s\r\n", in_buffer);
wait(1.0);
};
client.close();
}
Demo:
COMMENTS