components
Hardware Components
Arduino WiFi Rev 2
X 1
Arduino Ethernet Shield 2
X 1
20 x 4 I2C LCD Screen
X 1
560 Piece Jumper Wire Kit
X 1
CR1220 Batteries
X 1
Adafruit Ultimate GPS
X 1
220 Ohm Resistors
X 1
Breadboard Kit
X 1
LED Kit
X 1
Software Apps and online services
Arduino IDEdetails
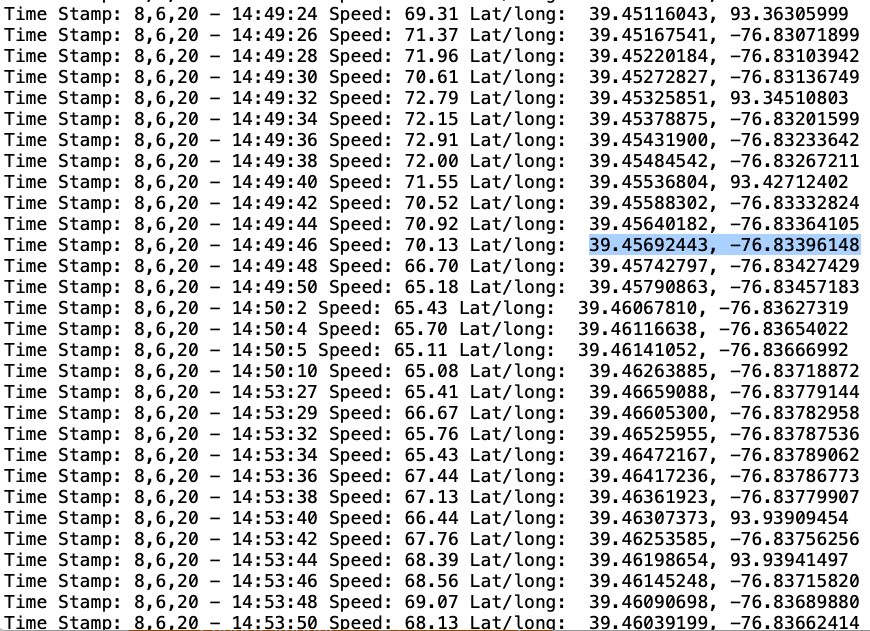
This project logs and alerts when a speed limit value is passed. You can assign a value as a Speed Limit and when that speed is passed the Red LED lights up, and the location and speed is logged to the SD Card.
Functional Parts in the Project:
- Arduino WiFi Rev 2 – https://store.arduino.cc/usa/arduino-uno-wifi-rev2
- Arduino Ethernet Shield 2 – https://store.arduino.cc/usa/arduino-ethernet-shield-2
- 20 x 4 I2C LCD Screen – https://amzn.to/2JVuKzn
- 560 Piece Jumper Wire Kit – https://amzn.to/2MsCLjL
- CR1220 Batteries – https://amzn.to/2X6h4ch
- Adafruit Ultimate GPS – https://amzn.to/3gYPrds
- 220 Ohm Resistors – https://amzn.to/2RiiMD9
- Breadboard Kit – https://amzn.to/2Xih5ei
- LED Kit – https://amzn.to/2Rjhs2N
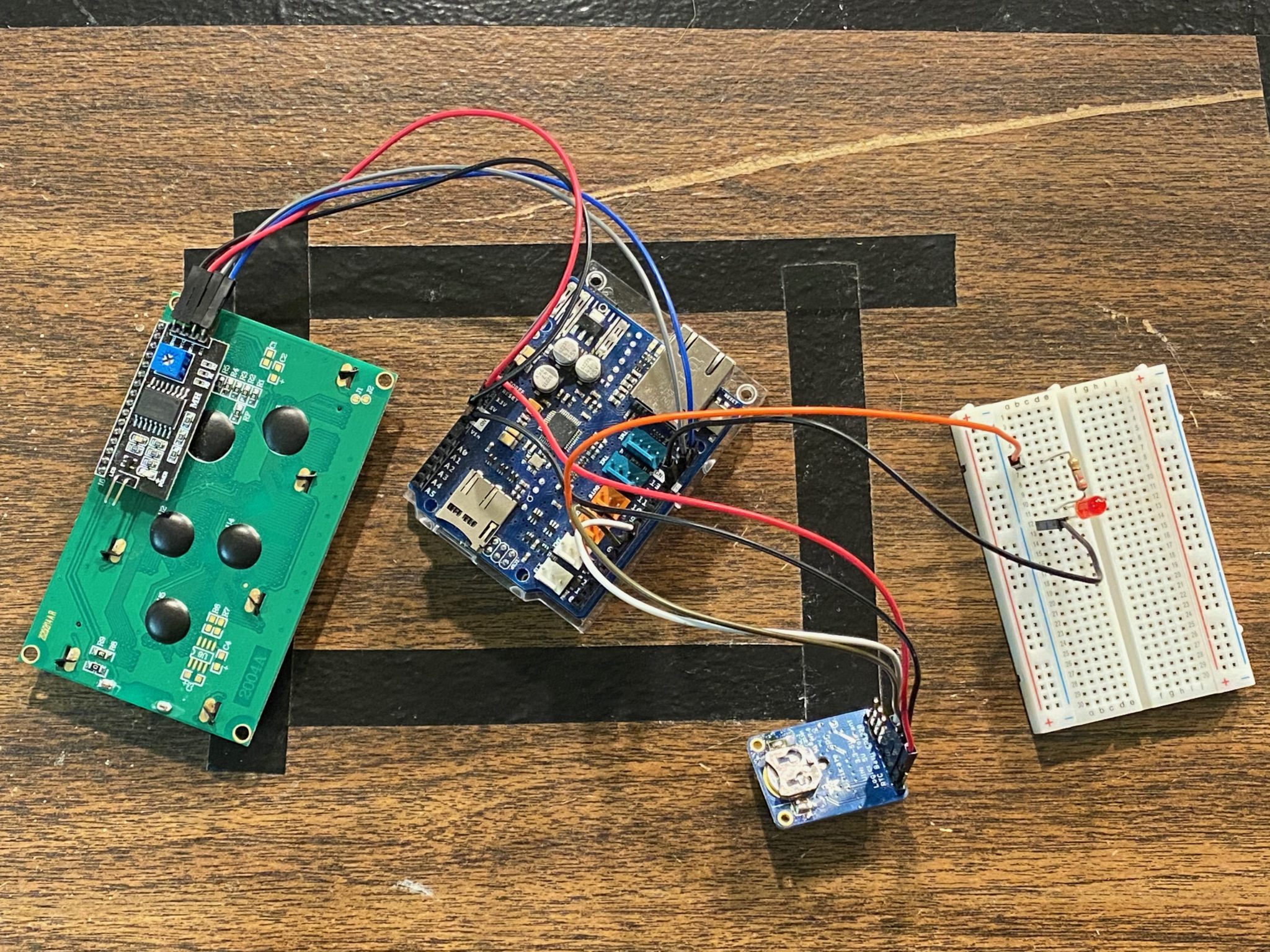
Wiring Guide:
- Ethernet Shield Connected to Arduino Uno with WiFi Rev 2
- For Shield it must have ICSP Header Connectors, and SDA/SCL connectors
- LED
- D3 – Resistor on Breadboard
- Resistor Connected to + LED Leg
- LED Ground – Ground on Arduino
- I2C LCD Screen
- SCA – SCA on Arduino
- SDA – SDA on Arduino
- VCC – 5V on Arduino
- Ground – Ground on Arduino
- Adafruit Ultimate GPS
- TX – D8
- RX – D7
- VCC – 3V on Arduino
- Ground – Ground on Arduino

//This is a modification of the Example code: GPS_SoftwareSerial_Parsing
//Works well with an Arduino Uno with WiFi Rev2,
//with Arduino Uno I get massive Latitude Issues
//Uses Official Ethernet Shield for ICSP Headers required for SD Usage on Arduino Uno with WiFi
#include <Adafruit_GPS.h>
#include <SoftwareSerial.h>
//ETCG Notes - LCD I2C Screen
#include <Wire.h>
#include <LCD.h>
#include <LiquidCrystal_I2C.h>
LiquidCrystal_I2C lcd(0x27, 2, 1, 0, 4, 5, 6, 7);
//ETCG Notes -- SD Card Setup on Ethernet Shield
#include <SPI.h>
#include <SD.h>
#define sdPin 4
File logFile;
//ETCG Notes -- Red LED and Speed Limit
#define redLed 3
int speedLimit = 65;
// Connect the GPS Power pin to 5V
// Connect the GPS Ground pin to ground
// Connect the GPS TX (transmit) pin to Digital 8
// Connect the GPS RX (receive) pin to Digital 7
// you can change the pin numbers to match your wiring:
SoftwareSerial mySerial(8, 7);
Adafruit_GPS GPS(&mySerial);
// Set GPSECHO to 'false' to turn off echoing the GPS data to the Serial console
// Set to 'true' if you want to debug and listen to the raw GPS sentences
#define GPSECHO true
void setup()
{
//ETCG Notes - Start LCD
lcd.begin(20, 4);
lcd.setBacklightPin(3, POSITIVE);
lcd.setBacklight(HIGH);
lcd.setCursor(0, 0);
lcd.print("Arduino GPS");
//ETCG Notes -- Checks for SD Card and Stops Loading if Not Found
while (!SD.begin(sdPin)) {
lcd.setCursor(0, 1);
lcd.print("SD Card Not Found");
}
//ETCG Notes -- Configure LED
pinMode(redLed, OUTPUT);
digitalWrite(redLed, HIGH);
delay(1000);
digitalWrite(redLed, LOW);
// connect at 115200 so we can read the GPS fast enough and echo without dropping chars
// also spit it out
Serial.begin(115200);
delay(5000);
Serial.println("Adafruit GPS library basic test!");
// 9600 NMEA is the default baud rate for Adafruit MTK GPS's- some use 4800
GPS.begin(9600);
// uncomment this line to turn on RMC (recommended minimum) and GGA (fix data) including altitude
GPS.sendCommand(PMTK_SET_NMEA_OUTPUT_RMCGGA);
// uncomment this line to turn on only the "minimum recommended" data
//GPS.sendCommand(PMTK_SET_NMEA_OUTPUT_RMCONLY);
// For parsing data, we don't suggest using anything but either RMC only or RMC+GGA since
// the parser doesn't care about other sentences at this time
// Set the update rate
GPS.sendCommand(PMTK_SET_NMEA_UPDATE_1HZ); // 1 Hz update rate
// For the parsing code to work nicely and have time to sort thru the data, and
// print it out we don't suggest using anything higher than 1 Hz
// Request updates on antenna status, comment out to keep quiet
GPS.sendCommand(PGCMD_ANTENNA);
delay(1000);
// Ask for firmware version
mySerial.println(PMTK_Q_RELEASE);
}
uint32_t timer = millis();
void loop() // run over and over again
{
//ETCG Notes -- Reset LED Every Loop
char c = GPS.read();
// if you want to debug, this is a good time to do it!
if ((c) && (GPSECHO))
Serial.write(c);
// if a sentence is received, we can check the checksum, parse it...
if (GPS.newNMEAreceived()) {
// a tricky thing here is if we print the NMEA sentence, or data
// we end up not listening and catching other sentences!
// so be very wary if using OUTPUT_ALLDATA and trytng to print out data
//Serial.println(GPS.lastNMEA()); // this also sets the newNMEAreceived() flag to false
if (!GPS.parse(GPS.lastNMEA())) // this also sets the newNMEAreceived() flag to false
return; // we can fail to parse a sentence in which case we should just wait for another
}
// approximately every 2 seconds or so, print out the current stats
if (millis() - timer > 2000) {
timer = millis(); // reset the timer
Serial.print("nTime: ");
if (GPS.hour < 10) {
Serial.print('0');
}
Serial.print(GPS.hour, DEC); Serial.print(':');
if (GPS.minute < 10) {
Serial.print('0');
}
Serial.print(GPS.minute, DEC); Serial.print(':');
if (GPS.seconds < 10) {
Serial.print('0');
}
Serial.print(GPS.seconds, DEC); Serial.print('.');
if (GPS.milliseconds < 10) {
Serial.print("00");
} else if (GPS.milliseconds > 9 && GPS.milliseconds < 100) {
Serial.print("0");
}
Serial.println(GPS.milliseconds);
Serial.print("Date: ");
Serial.print(GPS.day, DEC); Serial.print('/');
Serial.print(GPS.month, DEC); Serial.print("/20");
Serial.println(GPS.year, DEC);
Serial.print("Fix: "); Serial.print((int)GPS.fix);
Serial.print(" quality: "); Serial.println((int)GPS.fixquality);
if (GPS.fix) {
//ETCG Notes -- Determine MPH
float mph;
mph = (GPS.speed) * 1.15;
Serial.print("Location: ");
Serial.print(GPS.latitude, 8); Serial.print(GPS.lat);
Serial.print(", ");
Serial.print(GPS.longitude, 8); Serial.println(GPS.lon);
//ETCG Notes -- The Following Gives Coordinates in formant you can plug into
//Google Maps (Degrees)
Serial.println("Location in Degrees");
Serial.print(GPS.latitudeDegrees, 8);
Serial.print(", ");
Serial.println(GPS.longitudeDegrees, 8);
Serial.print("Speed (knots): "); Serial.println(GPS.speed);
Serial.print("Angle: "); Serial.println(GPS.angle);
Serial.print("Altitude: "); Serial.println(GPS.altitude);
Serial.print("Satellites: "); Serial.println((int)GPS.satellites);
//ETCG Notes -- Print to LCD Screen
lcd.clear();
lcd.setCursor(0, 1);
lcd.print("Spd: ");
lcd.setCursor(5, 1);
lcd.print(mph);
lcd.setCursor(0, 2);
lcd.print("Lat: ");
lcd.setCursor(5, 2);
lcd.print(GPS.latitudeDegrees, 8);
lcd.setCursor(0, 3);
lcd.print("Lon: ");
lcd.setCursor(5, 3);
lcd.print(GPS.longitudeDegrees, 8);
//ETCG Notes -- Write to SD Card
if (mph > speedLimit) {
digitalWrite(redLed, HIGH);
logFile = SD.open("gpsLog.txt", FILE_WRITE);
String timeStamp = String(GPS.day, DEC) + (",") + String(GPS.month, DEC) + (",") + String(GPS.year, DEC) + (" - ")
+ String(GPS.hour, DEC) + (":") + String(GPS.minute, DEC) + (":") + String(GPS.seconds, DEC);
if (logFile) {
logFile.print("Time Stamp: ");
logFile.print(timeStamp);
logFile.print(" Speed: ");
logFile.print(mph);
logFile.print(" Lat/long: ");
logFile.print(GPS.latitudeDegrees, 8);
logFile.print(", ");
logFile.println(GPS.longitudeDegrees, 8);
logFile.close();
}
} else {
digitalWrite(redLed, LOW);
}
} else {
lcd.clear();
lcd.setCursor(0, 1);
lcd.print("No Signal");
}
lcd.setCursor(0, 0);
lcd.print("Satellites: ");
lcd.setCursor(12, 0);
lcd.print((int)GPS.satellites);
}
}
COMMENTS