INTRODUCTION
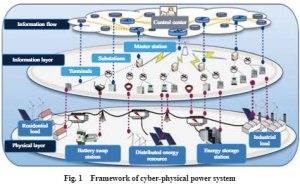
In the field of modern power systems, the emerging concept of a cyber-physical power system (CPPS) emphasizes the heterogenous integration of the physical systems of the power network infrastructure and cyber systems for information sensing, processing, intelligence, and control [1-3]. With this integration, a smart grid is expected to greatly enhance the efficiency, reliability, and flexibility of power production and consumption, along with the access to renewable energy resources, the demand response, and distributed intelligence [4-6]. In order to achieve this goal, various cooperative control schemes have been introduced to meet the complicated control objectives of a CPPS. With a properly designed observation network, each control unit can monitor the behaviors of all its neighbors, and execute control
instructions under uncertain communication conditions [7].

1.2 Cooperative control applications of co-simulation testbed Depending on the above characteristics, the co- simulation testbed should map the cooperative control characteristics of a CPPS into the simulation network. The co-simulation of a cooperative control strategy aims at verifying the effectiveness of the control algorithm under a CPPS environment. At the level of the controlled targets, the cooperative control applications of the co- simulation roughly include the strategy for an independent system [23], the control scheme for specific distributed
resources [10], and the control scheme for multiple power electronics equipment [24]. In addition, a security analysis of the applications under cooperative control is always considered. These three main applications are discussed.
2 Components of CHIL testbed
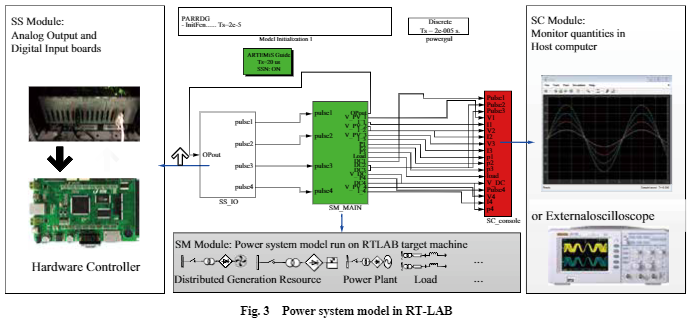
2.1 Power system simulation The power system was modeled in the real-time simulator RT-LAB developed by the company OPAL-RT [25]. RT-LAB, which is fully integrated with MATLAB Simulink, includes a test application system for rapid control prototyping and hardware in the loop. With a small step size operation, RT-LAB can perform in real time and provide digital and analog signal input/output ports for high- speed data exchange with real-life equipment. The power system model could be changed using Simulink in the host computer. RT-LAB split this model into three subsystems: the SM module, SS module, and SC module. A typical segmented power system model is shown in Fig. 3
2.2 Cyber system simulation
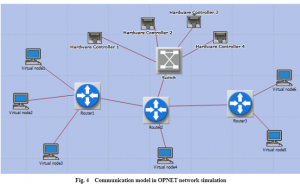
The communication system simulation utilized a network simulation server (high-performance computer) with the OPNET software [26] and multiple network interface cards (NIC). The communication model of the CPPS was built in the network simulation server and used to set up the corresponding communication nodes, including virtual nodes and actual nodes.
2.3 Hardware controller terminal
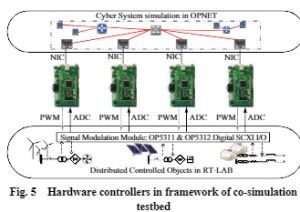
Combining the new control characteristics presented in subsection 2.1, the hardware controller application was developed based on the TMS320F28377D chip from Texas Instruments, which has a 200 MHz main frequency and dual-core 32-bit floating-point microcontroller unit [28]. The relationship between the hardware controller and the cyber-physical system simulation is shown in Fig. 5. One single hardware controller was composed of a monitoring unit, control module, communication module, and so on. For the monitoring unit, the real-time operating data in RT-LAB were collected using the ADC module of the hardware controller, where the signals were converted from analog to digital. Each hardware controller had 20 (12-
bit) ADC channels. Thus, a single controller could measure 20 analog values and discretize them at the internal clock frequency to complete the analog-to-digital conversion. The cooperative control algorithm was programmed into the control module, and the control instructions were output as typical PWM signals. Each controller had 16 PWM channels, which was enough to meet the requirements. The communication module in the controller was developed based on the Ethernet w5300 chip [29]. Using the TCP/IP protocol, every controller was connected to the SITL interface of the cyber simulation in OPNET to realize the CHIL participation.
3 Case study
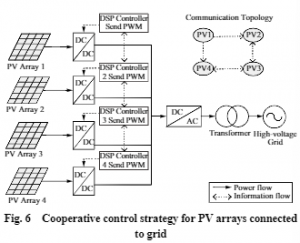
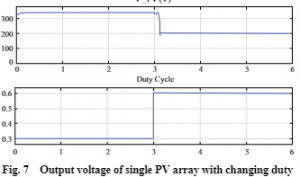
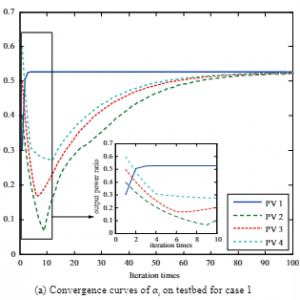
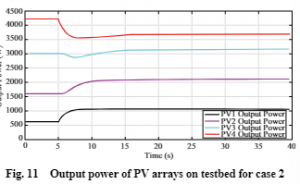
3.1 Cooperative control strategy for multiple DGs To verify the need for the hardware controllers and their influence on the power and cyber system simulation, a classical cooperative control strategy for multiple distributed photovoltaic (PV) generators connected to a grid was tested on the proposed testbed. Using the system model shown in Fig. 6, the cooperative strategy was designed to make the four PV generators converge and operate at a certain (or the same) ratio of available power. Each hardware control unit only collected the real-time power information of the corresponding controlled unit. The expected output voltage value of each PV array was calculated and represented by the duty cycle of the PWM signals.
4 Conclusion
In order to determine the cooperative control characteristics of a CPPS, this study investigated a co-simulation testbed with controller hardware-in-the-loop to overcome the shortcomings of a fully digital simulation. The testbed based on the RT-LAB real-time simulation system and OPNET discrete-event simulation tool had the capability of accurately modeling the physical power system and cyber system in real time. The hardware controllers acted as the sensors and actuators of the cooperative control algorithm, replacing the code used in a fully digital
simulation, which provided a co-simulation environment for researchers to verify the performance of a cooperative control strategy for a CPPS.

COMMENTS